Az óceán hatalmas, és az azt megértésére irányuló erőfeszítéseink nagyrészt csak a felszínt kapargálják. Az Amerikai Nemzeti Óceán- és Légkörkutató Hivatal adatai szerint a kék óceán mintegy 80 százaléka "feltérképezetlen, megfigyeletlen és felfedezetlen terület".
A hajók az elsődleges eszközeink az óceánról származó információk gyűjtésére, de gyakori küldésük költséges. Az újabb fejlesztések során az Argo úszógömbök néven ismert robotikus bóják jelentek meg, amelyek az áramlatokkal sodródnak, merülnek és emelkednek, hogy különböző méréseket végezzenek akár 6500 láb mélységig. Azonban a Kaliforniai Technológiai Intézet laboratóriumából származó új vízi robotok mélyebbre tudnak hatolni és specifikusabb víz alatti feladatokat is elláthatnak.
"Azt képzeljük el, hogy egy globális óceánkutatási megközelítést alkalmazunk, ahol különböző típusú kisebb robotok hadait telepítjük az óceánba a nyomkövetéshez, az éghajlatváltozás vizsgálatához és az óceán fizikájának megértéséhez"
- mondta John O. Dabiri, a Kaliforniai Technológiai Intézet repülés- és gépészmérnöki tanszékének professzora.
Itt lép be a képbe a CARL-Bot (Caltech autonóm megerősítő tanuló robot), egy tenyérnyi méretű vízi robot. Motorokkal rendelkezik az úszáshoz, súlyozott, hogy egyenesen tudjon maradni, és szenzoraival képes érzékelni a nyomást, a mélységet, az gyorsulást és az orientációt. Minden, amit a CARL tesz, a benne található mikrovezérlővel működik, amelynek 1 megabájt processzora kisebb, mint egy bélyegző.
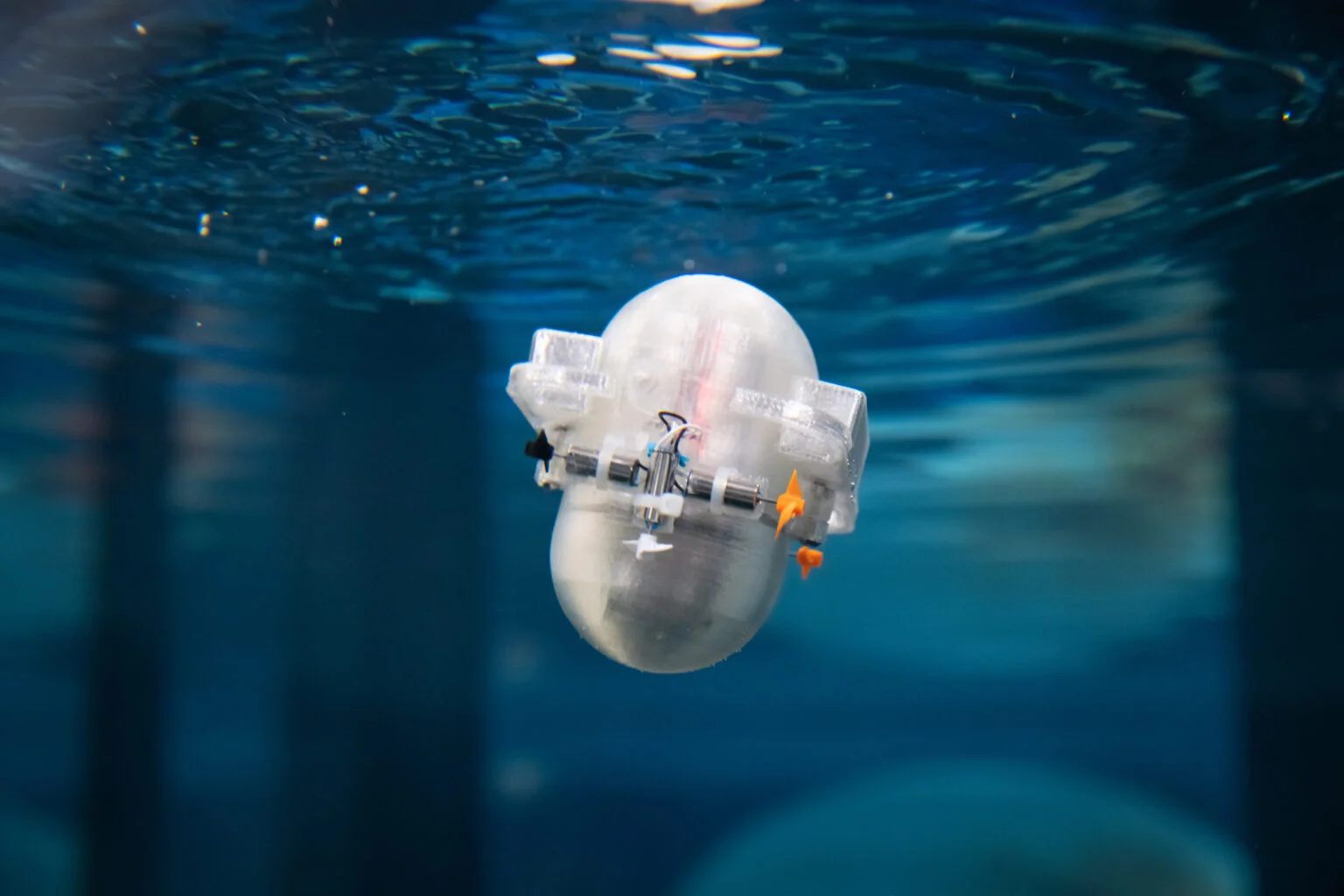
A CARL a Dabiri laboratóriumának legújabb óceánáthatoló innovációja, amelyet Peter Gunnarson, a Caltech doktorandusza készített és 3D nyomtatott otthon. Az első teszteket Gunnarson a fürdőkádban végezte, mivel a Caltech laboratóriuma 2021 elején a COVID miatt zárva volt.
Jelenleg a CARL még távirányítással irányítható, de, hogy valóban eljusson az óceán legmélyebb részeihez, ezt meg kell változtatni. Nem lehet kutató, aki utasításokat adna a CARL-nak - saját maga kell megtanulnia navigálni az óceánon. Gunnarson és Dabiri felkeresték a számítástudós Petros Koumoutsakost, aki segített az AI algoritmusok fejlesztésében a CARL számára, hogy az változások és korábbi tapasztalatai alapján képes legyen orientálni magát a közvetlen környezetében. Kutatásukat a Nature Communications folyóiratban tették közzé.
A CARL képes megtervezni az útvonalát az aktuális viszonyokhoz igazítva, hogy kerülje a zavaros áramlatokat és eljusson a célállomásához. Vagy akár egy kijelölt helyen is egyhelyben maradhat, és minimális energiafelhasználással működhet egy lítium-ion akkumulátorról.
Koumoutsakos által kidolgozott algoritmusok képesek navigációs számításokat végezni a kis roboton. Az algoritmusok kihasználják a robot korábbi találkozásainak emlékeit is, például hogyan lehet átvészelni egy örvényt. "Ezt az információt használhatjuk arra, hogy eldöntsük, hogyan navigáljunk ezekben a helyzetekben a jövőben" - magyarázza Dabiri. A CARL programozása lehetővé teszi számára, hogy emlékezzen a korábbi küldetéseken végzett hasonló útvonalakra, és "ismételt tapasztalatok során egyre jobban és jobban tudja mintavételezni az óceánt kevesebb idővel és energiával" - tette hozzá Gunnarson.
A gépi tanulás nagy része szimulációban történik, ahol az adatpontok tiszták. Az átvitel a való világba azonban bonyolult lehet. Az érzékelők néha túlterhelhetők és nem minden szükséges metrikát tudnak érzékelni. "Még csak most kezdjük el a kísérleteket a fizikai tartályban" - mondja Gunnarson. Az első lépés az, hogy teszteljék, hogy a CARL képes-e egyszerű feladatokat elvégezni, például ismételt merüléseket.
A tesztelés során a csapat beállítja a CARL érzékelőit. "Az egyik kérdésünk az volt, hogy mi a minimális érzékelőkészlet, amelyet fel kell szerelni a feladat teljesítéséhez" - mondja Dabiri. Ha egy robot fel van szerelve olyan eszközökkel, mint a LiDAR vagy kamerák, "az korlátozza a rendszer képességét, nem tud nagyon hosszú ideig maradni az óceánban, mielőtt le kellene cserélni az akkumulátort." Az érzékelő terhelés könnyítésével a kutatók növelhetik a CARL élettartamát és helyet nyithatnak a tudományos műszerek hozzáadásához, amelyekkel pH, sótartalom, hőmérséklet és más paraméterek mérhetők.
Dabiri szerint a kutatócsoport célja, hogy a CARL-t hosszú távú óceánkutatásra használják, beleértve az éghajlatváltozás monitorozását, az óceáni ökoszisztémák vizsgálatát és az óceáni fizikai folyamatok megértését.